Missiooni käik
Magnetanomaalia ja pildid Eestist
Miks kosmoses satelliiti pöörata
Viimane signaal
Tulemused numbrites
Alamsüsteemid
Missiooni edukaks täitmiseks peab satelliit täitma paljusid funktsioone, alates raadio teel Maaga suhtlemisest ja elektrienergia haldamisest kuni asendi orbiidil korrigeerimise, kaameraga piltide tegemise ja peamissioonil traadi väljakerimise ning elektriliselt laadimiseni.
Satelliit koosneb järgmistest alamsüsteemidest:
- ADCS - satelliidi asendi määramine orbiidil ja vajadusel selle muutmine
- CAM - pardakaamera Maast ja väljakeritud traadist piltide tegemiseks
- CDHS - satelliidi põhiline pardaarvuti
- COM - raadioside pidamiseks Maa ja satelliidi vahel
- EPS - elektrienergia haldamise alamsüsteem, kasutatakse ka majakasignaali saatmiseks
- PL - satelliidi eksperimendimoodul, sisaldab päikesepurje traati ja kõike muud eksperimendiks vajalikku
- STR - satelliidi struktuursed elemendid (raam, külgi katvad paneelid ja raadioantennid)
Maapealse toe tagavad:
- GS - sidekeskus satelliitidega sidepidamiseks
- MCS - missioonijuhtimissüsteem ehk tarkvara, mille abil on võimalik satelliidi tööd kontrollida
Kasulik ja veel pooleli sõnavara ESTCube-1 kohta: läti-inglise-eesti Satelliiditehnoloogia oskussõnavara sõnaraamat.
ADCS
Satelliidi asendi määramise ja juhtimise alamsüsteem (ingl. k. Attitude Determination and Control System) eesmärgiks on teha kindlaks, milline on satelliidi asend orbiidil, kui kiiresti satelliit pöörleb ja vajadusel selle asendi ning kiiruse muutmine.
Asendi kindlaksmääramine
Satelliit on varustatud päikesesensorite, magnetomeetrite ja güroskoopidega. Kõigi nimetatud sensorite andmeid kombineerides on võimalik määrata satelliidi asend Maa ja Maa magnetvälja suhtes ning mõõta satelliidi pöörlemiskiirust.
Päikesesensorid koosnevad korpusest, milles on kaks pilu ja pilude taga asuvatest sensoritest koos vajaliku elektroonikaga. Pilu läbiv päikesekiirgus tekitab sensoritele valgustriibu, mille asukoha saab elektroonika abil kindlaks määrata. Asukoha järgi sensoritel saab arvutada, millise nurga all on antud sensor Päikese suhtes. Satelliidil on kokku kuus päikesesensorit (igal küljel üks), millest igaüks suudab Päikese suuna iseseisvalt määrata. Tulemusena näeb alati vähemalt üks päikesesensor Päikest ja satelliidi asend selle suhtes on alati määratav.
Magnetomeeter on seade magnetvälja suuna määramiseks. Selle abil on võimalik tuvastada magnetvälja suund satelliidi asukohas ja võrdluses pardal oleva Maa magnetvälja mudeliga satelliiti juhtida.
Pardal olevad güroskoobid mõõdavad satelliidi pöörlemiskiirust kõigi kolme telje ümber.
Satelliidi juhtimine
Satelliidi sensoritest saadud info põhjal on võimalik määrata satelliidi asend mistahes ajahetkel ja magnetvälja suund. Nii on võimalik arvutada, kui palju erineb satelliidi asend soovitust ja kuidas peaks satelliidi elektromagnetite tugevust seadistama, et saavutada soovitud asend ja pöörlemiskiirus.
Kontaktisik: Andris Slavinskis, andris.slavinskis@estcube.eu
CAM
Satelliidi pardakaamerat (CAM) kasutatakse missiooni käigus Maast ja lahtikerimisel olevast traadist piltide tegemiseks. Kaamera lahutusvõime, 640x480 pikslit, on piisav hea kvaliteediga piltide tegemiseks.
Kontaktisik: Henri Kuuste, henri.kuuste@estcube.eu
CDHS
Mida CDHS teeb?
CDHS (ingl. k. Command and Data Handling System) ehk Käsu- ja Andmehaldussüsteem on pardaarvuti, mis juhib satelliidi käitumist normaalolukorras. Pardaarvuti salvestab missiooni andmeid, infot alamsüsteemide tervise kohta ja edastab need COM-ile Maale saatmiseks. Käsu- ja Andmehaldussüsteem jooksutab ka ADCS-i (ingl. k. Attitude Determination and Control) ehk satelliidi orientatsiooni juhtiva süsteemi protsesse.
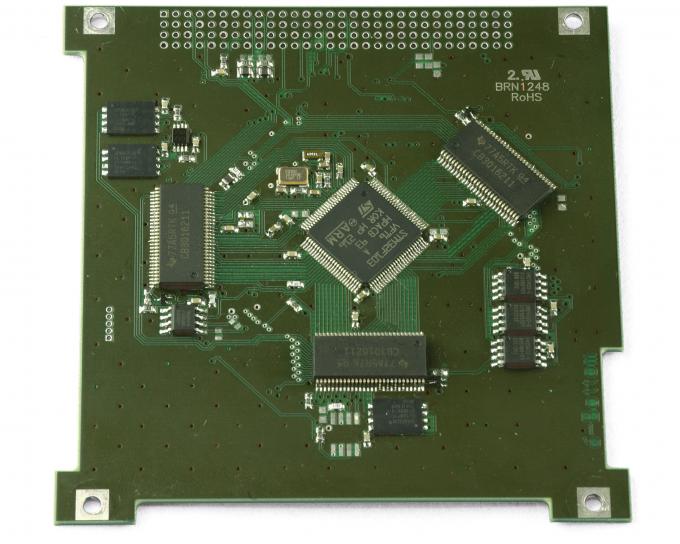
Pardaarvuti seestpoolt
Süsteemis on kaks STM32F103 ARM Cortex-M3 mikrokontrollerit, millest vaid üks on korraga sisse lülitatud. Juhul kui ühe mikrokontrolleriga peaks midagi juhtuma, lülitatakse ümber teisele ning satelliit jätkab oma tööd. Välised mäluseadmed on jagatud mõlema mikrokontrolleri vahel.
CDHS pardal on 3 SPI välkmälu (Spansion S25FL128P), igaüks 16 MB. Välkmälu kasutatakse suuremahuliste andmete hoiustamiseks: missioonilogi, kaamera pildid ja satelliidi tervishoiu info. Lisaks on pardal ka 5 SPI FRAM seadet (Ramtron FM25V20), igaüks 256 KB. FRAM ehk ferroelektrilist muutmälu kasutatakse failisüsteemide metaandmete, süsteemi failide ja CDHS püsivara koopiate tarbeks.
| No. | Seade | Omadus | Väärtus |
|---|---|---|---|
| 2 | STM32F103VFT | Välkmälu | 768 KB |
| Muutmälu | 96 KB | ||
| Taktsagedus | .. 72 MHz | ||
| 5 | FM25V20 | SPI ferroelektriline muutmälu |
256 KB (kokku 1280 KB) |
| SPI taktsagedus | .. 20 MHz | ||
| 3 | S25FL128P | SPI välkmälu | 16 MB (kokku 48 MB) |
| SPI taktsagedus | .. 20 MHz | ||
| 1 | DS3234 | SPI reaalajakell |
COM
Satelliidi kommunikatsioonisüsteem (ingl. k. Communications) võimaldab suhtlust satelliidi ja maapealsete sidejaamade vahel. Satelliidil on üks ühenduskanal info vastuvõtmiseks Maalt ja kaks ühenduskanalit info Maale saatmiseks. Aeglasel ühenduskanalil edastatkase perioodiliselt telegraafisignaali, mis annab edasi kõige olulisemat infot satelliidi hetkeolukorra kohta. Kiiremat ühenduskanalit kasutatakse suuremate andmemahtude jaoks - nii piltide kui eksperimendi käigus kogutud andmete Maale saatmiseks. Sidepidamine satelliidiga toimub amatöörraadio 2-meetrisel lainealal ja 70-sentimeetrisel lainealadel.

Kontaktisisk: Andres Vahter, andres.vahter@estcube.eu
EPS
Satelliit saab orbiidil energiat päikesepaneelidest, mis paiknevad satelliidi külgedel. Missiooni edukaks läbiviimiseks on vaja energiat päikesepaneelidest võimalikult efektiivselt koguda, ülejäägi korral seda akudesse salvestada ja kogutud energiat satelliidi tegevuste jaoks laiali jaotada.
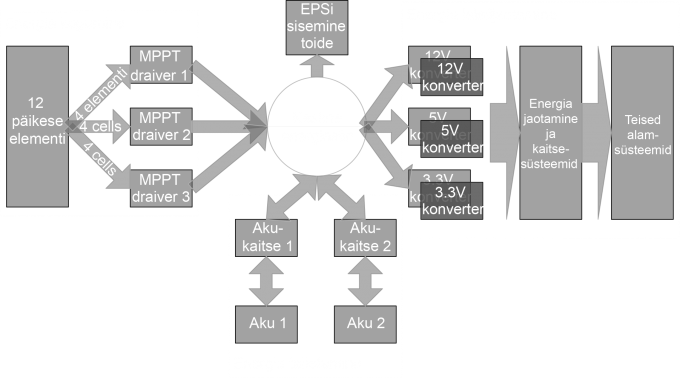
Elektrienergia alamsüsteem (EPS - ingl. k. Electrical Power System) korjab energiat päikesepaneelidelt, kogub seda akudesse ja jaotab vastavalt vajadusele laiali kogu satelliidile. Ülaloleval pildil on toodud alamsüsteemi lihtsustatud skeem, mis kujutab süsteemi erinevaid osasid ja energia liikumist nende vahel. Lisaks energia laialijaotamisele juhib EPS kogu satelliiti missiooni algfaasis ja hiljem hädaolukordade korral. Kuna süsteem peab toimima elektroonikale väga ebasõbralikus keskkonnas (kõrge kiirgustase, vaakum), on sellesse kavandatud mitmeid kaitselahendusi. Näiteks on paljud olulised komponendid dubleeritud ja ahelates on palju elektroonilisi voolupiirajaid, mis kaitsevad süsteemi lühiste eest. Selle alamsüsteemi abil saadab satelliit ka majakasignaali.

Energia kogumine
Energia kogumiseks on satelliidil 6 päikesepaneeli, millest igaüks koosneb kahest elemendist. Iga päikesepaneel toodab optimaalsetes tingimustes 2.4 W elektrienergiat, kuid ainult siis, kui Päikese poole on pööratud ainult üks päikesepaneel. Satelliidi kuubikujulisuse tõttu valgustab Päike satelliidi pöörlemise erinevates faasides enamasti mitut päikesepaneeli ja seetõttu on summaarne toodetav võimsus tavatemperatuuril 2.4 W - 3.6 W. Lisaks sõltub võimsus ka satelliidi külgpaneelide temperatuurist, sest paneelide efektiivsus väheneb temperatuuri tõustes, samuti ka paneelide vananemisest missiooni jooksul.
Päikesepaneelidest maksimaalse võimsuse kättesaamiseks on kasutusel maksimaalse võimsuspunkti jälgimise mikroskeemid. See lahendus on niivõrd uudne, et seda ei ole kosmoses seni veel katsetatud.
Energia salvestamine
Energia salvestamiseks on satelliidil kaks akut. Mõlemad akud on ühendatud iseseisvalt keskse energiasiiniga läbi eraldatud energiaskeemide, mis kaitsevad akusid liigse tühjakslaadimise, ülelaadimise ja lühise vastu.
Energia jaotamine
Energia jaotamine teistele alamsüsteemidele toimub läbi dubleeritud impulsskonverterite. Regulaatorite dubleerimine võimaldab EPSil tagada katkematu toite teistele alamsüsteemidele ka olukorras, kus üks regulaatoritest peaks rikke tõttu töötamise lõpetama.
Süsteemi juhtimine
EPSi juhib ATMega1280 8-bitine mikrokontroller, mille kosmosekõlblikkust on varasemate kuupsatelliitide lendudega kontrollitud. Häirete paremaks talumiseks on mikrokontrolleril iseseisev toiteahel, mis suudab tagada selle töö ka 100 millisekundit pärast elektri kadumist satelliidis, andes piisavalt aega vea leidmiseks ja automaatseks parandamiseks. Radiatsioonitaluvuse suurendamiseks on kontrolleri külge ühendatud ferroelektrilised muutmälud, mis tagavad praktiliselt radiatsioonikindla salvestusvõimaluse andmete ja tarkvara varukoopiate jaoks.
Kontaktisik: Mihkel Pajusalu, mihkel.pajusalu@estcube.eu
PL
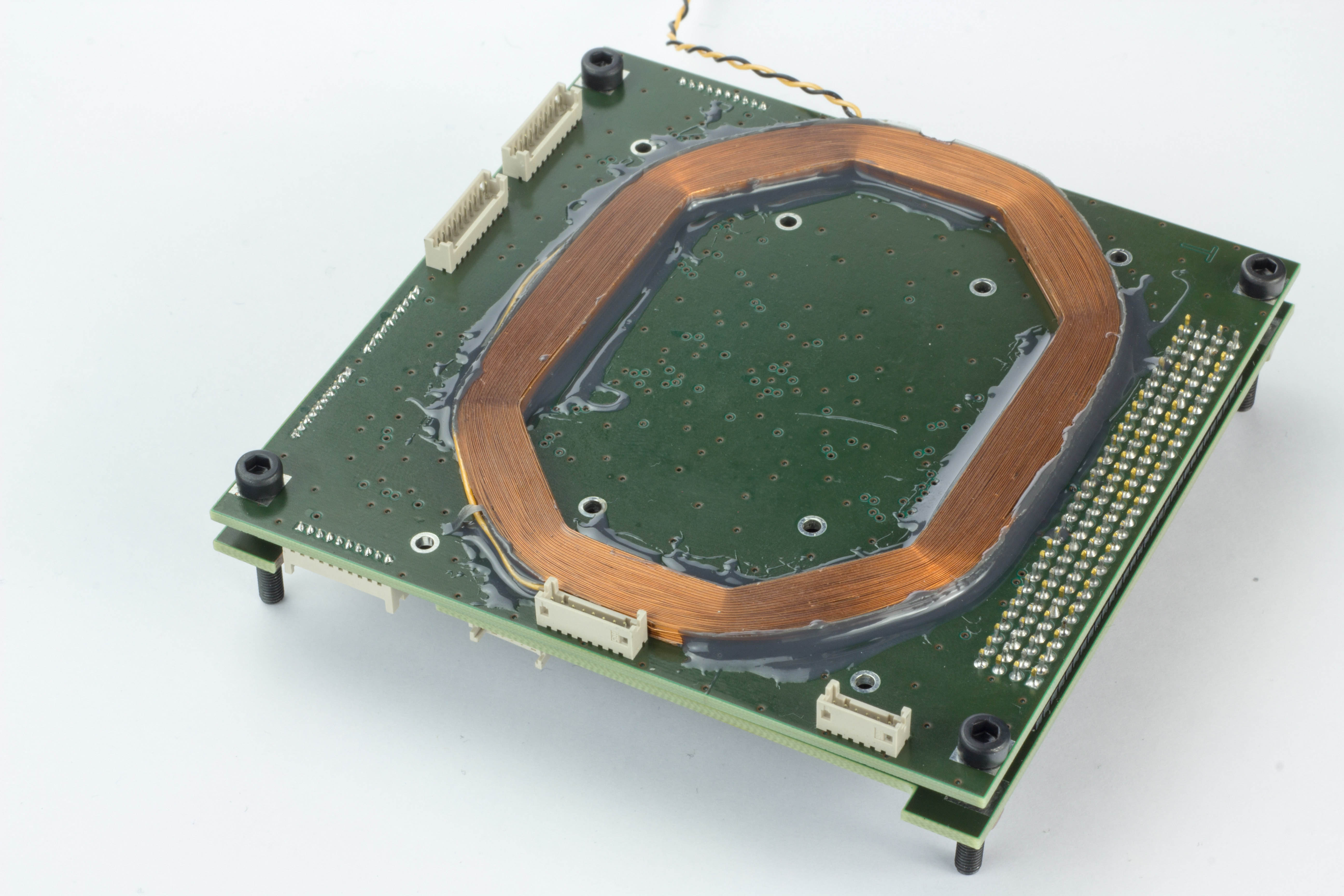
Satelliidi peamiseks missiooniks on elektrilise päikesetuulepurje katsetamine. Selleks on vaja satelliidist välja kerida peenike alumiiniumtraat, mis laetakse elektriliselt +500 voldini, kasutades selleks elektronkahureid. Kõigeks selleks vajalik paikneb PL (Payload) moodulis.
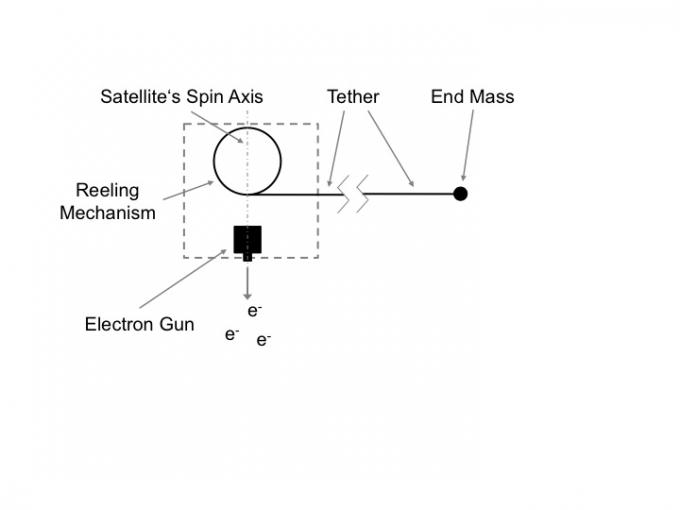
Moodulis paiknevad:
- Kõrgepingeahel, mis võimaldab traati pingestada +/- 500 voldiga
- Pool, millele on keritud päikesetuulepurje traat. Traadi otsas on raskuseks 0.5 grammine alumiiniumist kera, mis lihtsustab traadi väljakerimist pöörlemise ajal.
- Mootor traadi väljakerimiseks. Kasutusel on kosmosekõlbulik pieesoelektriline mootor, mille külge on kinnitatud pool traadiga.
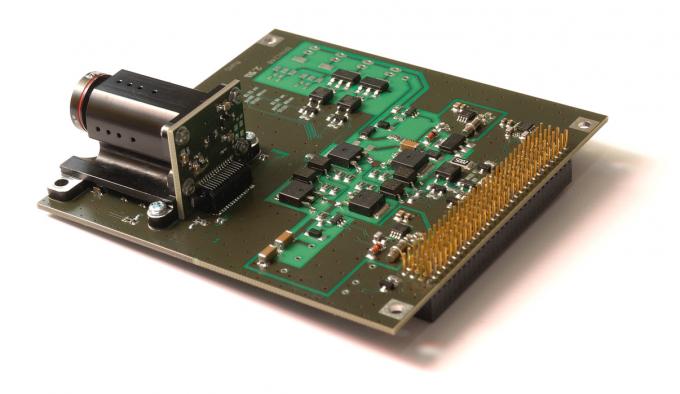
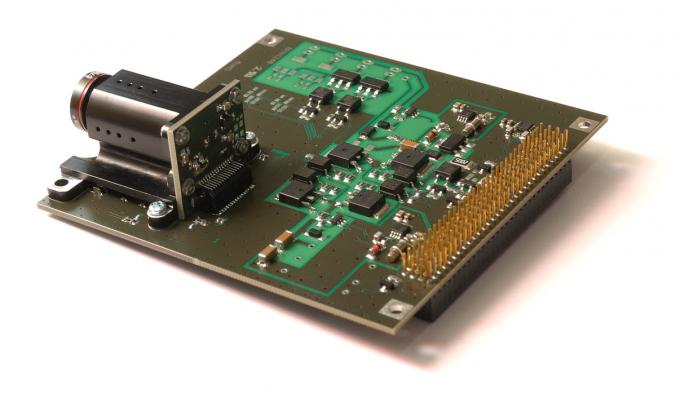
Elektroonikaplaat, mis tegeleb kõrgepinge tootmisega traadi laadimiseks. (Nurgas on näha ka CAM, mis asub füüsiliselt samal plaadil.)
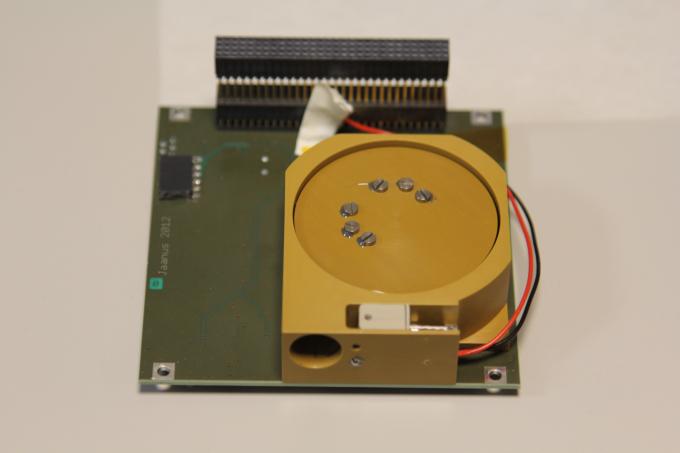
Elektroonikaplaat, kus asub mootor koos traadirulliga ning mootori juhtelektroonika.
Kontaktisik: Jouni Envall, jouni.envall@estcube.eu
STR
Satelliidi struktuuri ülesandeks on hoida koos kogu satelliidi elektroonikat, pakkuda tuge küljepaneelidele, millel asuvad energia kogumiseks vajalikud päikesepaneelid. Ka Maaga side pidamiseks kasutatavad raadioantennid kinnituvad ühele küljepaneelile.
Satelliidi raam vastab mõõtudelt ja muudelt omadustelt Cubesat-standardile. Kuna kanderaketi stardil valitsevad väga karmid tingimused - eeskätt väga tugevad vibratsioonid - siis on ka raamile esitatavad nõuded väga kõrged. Maksimaalse vastupidavuse huvides on satelliidi masinprojekteerimise tarkvara abil optimeeritud raam välja lõigatud ühest alumiiniumitükist.

Kontaktisik: Paul Liias, paul.liias@estcube.eu
GS
Satelliitsiside keskus (GS - ingl. k. ground station) on raadiojaam Maa pinnal, mille kaudu peetakse sidet satelliidiga. Sidekeskus koosneb satelliiti jälgivatest antennidest, raadiojaamast, pakettside modemist ning kõiki neid seadmeid juhtivast arvutist.
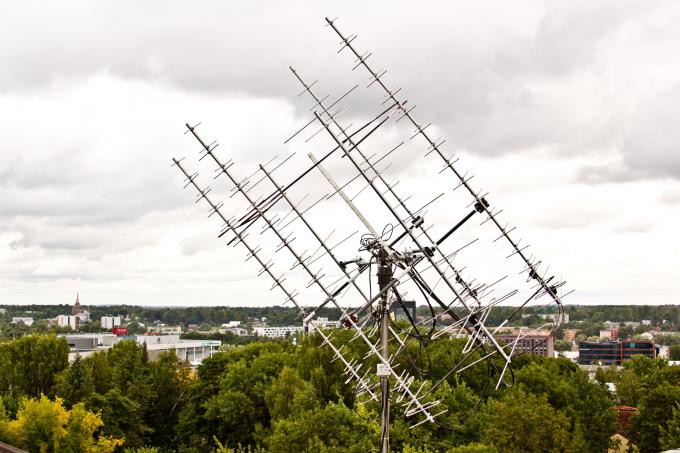
Kontaktisik: Tõnis Eenmäe, tonis@estcube.eu
MCS
Eesti tudengisatelliidiga peetakse sidet uue põlvkonna kosmosemissioonide juhtimise tarkvaga (MCS - ingl. k. Mission Control System), millega saab Maa pealt juhtida ESTCube-1 missiooni. Lahendus võimaldab jälgida satelliidi liikumist orbiidil, saata satelliidile käsklusi ning saada ülevaadet satellidilt vastuvõetud andmepakkettide sisust. Kõiki süsteemis olevaid andmeid on võimalik vaadata nii reaalajas kui ka tagasiulatuvalt kuni missiooni alguseni. Missioonijuhtimistarkvaraga saab juhtida ja jälgida ka maapealseid sidejaamasid ning nende komponente.
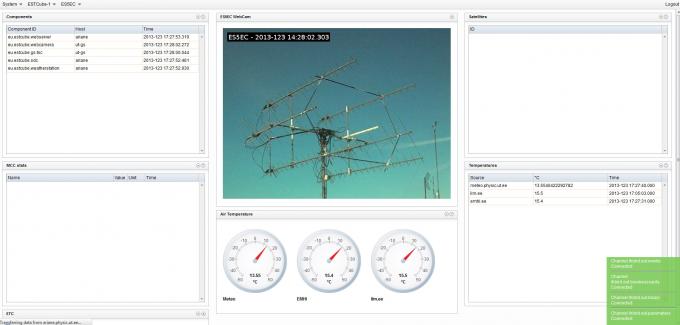
Eesti tudengisatelliidi missioonijuhtimistarkvara on esimene omataoline maailmas, olles vabavaraline ning veebipõhine. Vabavaralisus annab teistele tudengisatelliidi projektidele võimaluse kasutada Eestis loodud missioonijuhtimistarkvara ka oma satelliitide juures. Veebipõhisus tähendab, et tarkvara saab kasutada igas Internetiga varustatud punktis. Nii on võimalik luua ühtset maajaamade võrgustikku, tänu millele saab kas ESTCube-1 või mõne teise satelliidiga tihedamalt sidet pidada.
Missioonijuhtimistarkvara arendamisel juhendavad Eesti tudengeid rahvusvahelise tarkvaraarendusfirma CGI Eesti kosmoseprojekti meeskonna spetsialistid. Nende välja arendatud vabavaraline tarkvararaamistik Hummingbird on Eesti missioonijuhtimistarkvara selgrooks.
Missioonijuhtimistarkvara hakatakse kasutama Tartu Observatooriumis avatavas ESTCube-1 missioonijuhtimiskeskuses.
Kontaktisik: Urmas Kvell, urmas.kvell@estcube.eu